

1. 简介
本文通过透射电子显微镜原位观察,研究了纳米晶铂薄膜在原子尺度下的动态变形过程。
研究发现,塑性变形的主要机制随晶粒尺寸的变化而演变:在大晶粒(晶粒尺寸d > 10 nm)中,塑性变形由全位错活动主导;在较小晶粒(10 nm
结果表明,晶粒蠕变的贡献可忽略不计,晶粒旋转虽有效但贡献有限,而晶粒滑动被认为是纳米晶铂薄膜中主导的变形机制。本研究为这些变形过程的原子尺度机制提供了直接证据。

2. 文章亮点
1. 原子尺度动态变形机制的直接观测
通过原位透射电镜技术,首次在纳米晶铂薄膜中直接捕捉到全位错(d > 10 nm)、部分位错(6 nm
2. 临界晶粒尺寸的理论与实验验证
基于堆垛层错能模型,计算出全位错向部分位错转变的临界晶粒尺寸(6.7–9.3 nm),与实验结果(d ≈ 10 nm)高度吻合,揭示了晶粒尺寸对塑性机制演变的定量影响。
3. 晶界滑动主导变形的发现
通过应变速率模型分析,排除晶粒蠕变和旋转的主导作用,提出晶界滑动是d
3. 研究背景
金属材料可通过多种机制发生塑性变形。目前,关于主要塑性变形机制(尤其是位错活动)已建立了较为完善的知识体系。描述位错运动与晶界相互作用及其对强度影响的经典经验关系是Hall-Petch关系。然而,随着近年来金属材料晶粒尺寸的极端细化,研究发现当晶粒尺寸低于某一临界值时,该关系将失效。这是由于在极小尺度下,基体的力学条件发生改变,导致位错难以保留且常规位错活动无法进行。因此,理解纳米晶金属材料中塑性变形的产生与协调机制至关重要。
受限于极小尺度下金属变形机制研究的实验技术挑战,现有研究多依赖于理论分析。近年来,分子动力学(MD)模拟被广泛用于探究纳米晶金属的变形机制。部分研究表明,对于高堆垛层错能金属,随着晶粒尺寸减小,其变形机制会从全位错活动转变为晶界介导的变形。这种转变意味着金属强度随晶粒尺寸减小而降低,即出现反Hall-Petch关系。MD模拟还预测:在晶粒尺寸d
然而,目前文献中严重缺乏原子尺度的直接实验证据来验证MD模拟的预测。由于原子级分辨率研究的技术难度,纳米晶金属(d 。对于d
本研究利用自制双倾拉伸装置,通过原位高分辨TEM(HRTEM)观察晶粒尺寸为3–20 nm的纳米晶铂薄膜的变形过程,覆盖了“Hall-Petch关系”与“反Hall-Petch关系”的尺寸范围。需指出的是,“Hall-Petch效应”及其衍生概念“反Hall-Petch效应”描述的是块体材料的力学行为,依赖于晶界处微观塑性活动的统计可靠性。而TEM观察所用的薄膜或薄箔样品在厚度方向常为单晶(缺乏晶界),其位错活动的力学环境与块体材料显著不同。因此,尽管薄膜材料中可能仍存在这两种效应,但其数学表达式未必与块体材料的原始Hall-Petch方程相同。本研究通过TEM方法,从微观机制上定性描述了纳米晶铂薄膜的“Hall-Petch”与“反Hall-Petch”行为。
4. 图文解析
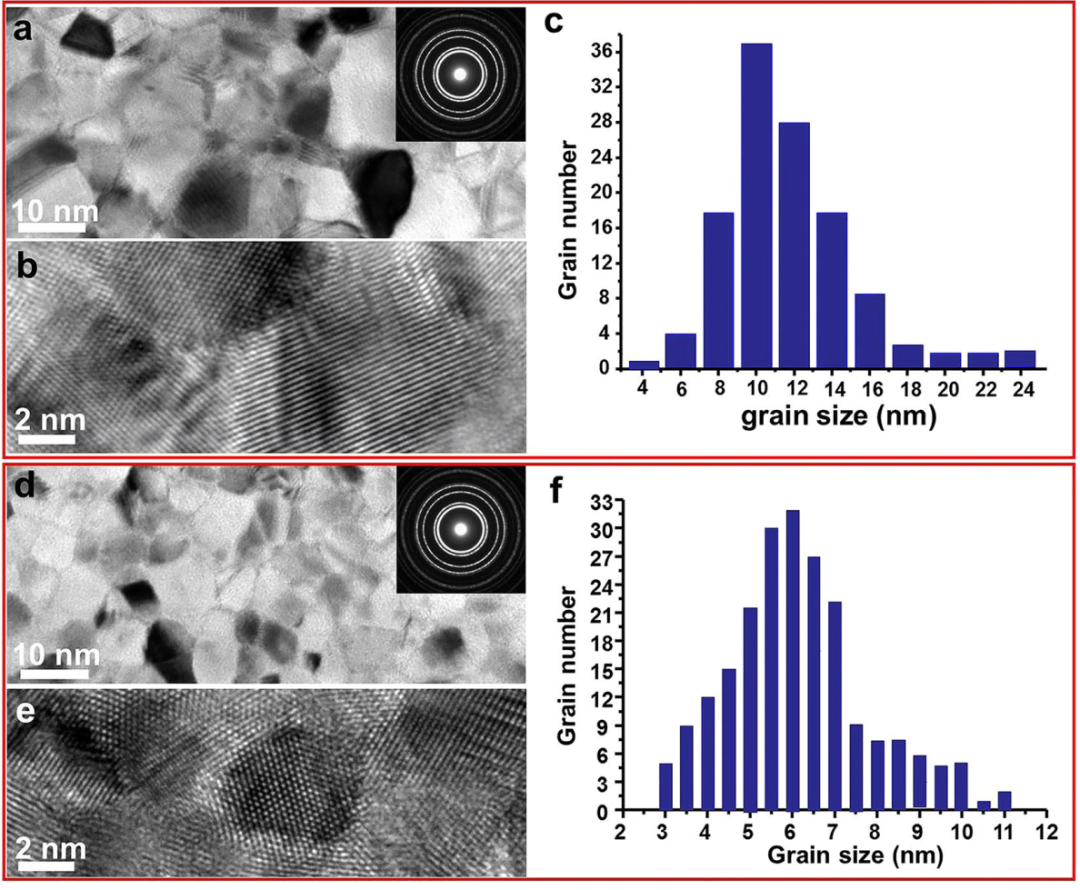
图像(a)和(b)分别展示了薄膜I在低倍和高倍下的微观结构。(a)中的插图为该薄膜的选区电子衍射花样。图(c)显示了薄膜的晶粒尺寸分布。图像(d)和(e)分别展示了薄膜II在低倍和高倍下的微观结构。(d)中的插图为该薄膜的选区电子衍射花样。图(f)显示了薄膜的晶粒尺寸分布。
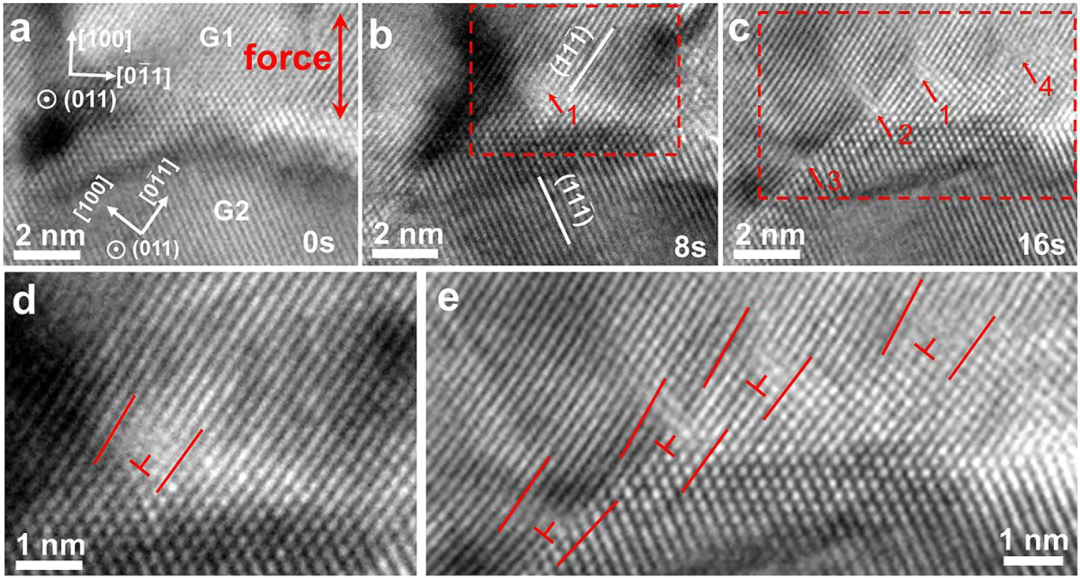
图像(a)、(b)和(c)为拉伸过程中间隔8秒拍摄的照片,展示了全位错在晶界处逐步形核并向晶粒内部移动的过程。(d)和(e)分别为(b)和(c)中框选区域的高分辨TEM放大图像,清晰显示了60°混合型全位错的额外半原子面。

展示了约8 nm晶粒中通过部分位错形成变形孪晶的过程。(a)为未变形状态,(b)为拉伸5秒后变形孪晶形核的HRTEM图像,(c)为(b)中框选区域的高倍放大图,详细展示了变形孪晶结构。
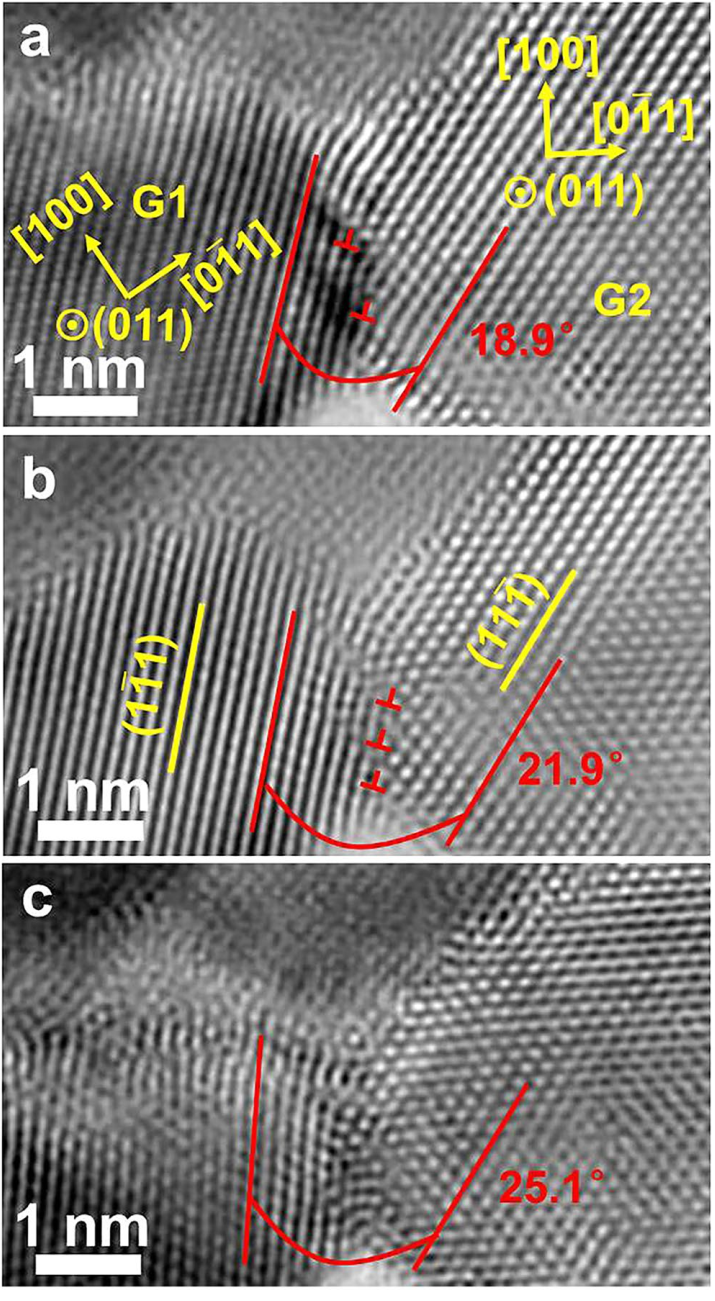
图像(a)、(b)和(c)显示应变逐步增加时,两个尺寸小于6 nm的晶粒(G1和G2)通过晶界位错密度增加导致的取向角从18.9°增至25.1°的过程。晶粒内部未观察到位错,表明旋转由晶界机制主导。
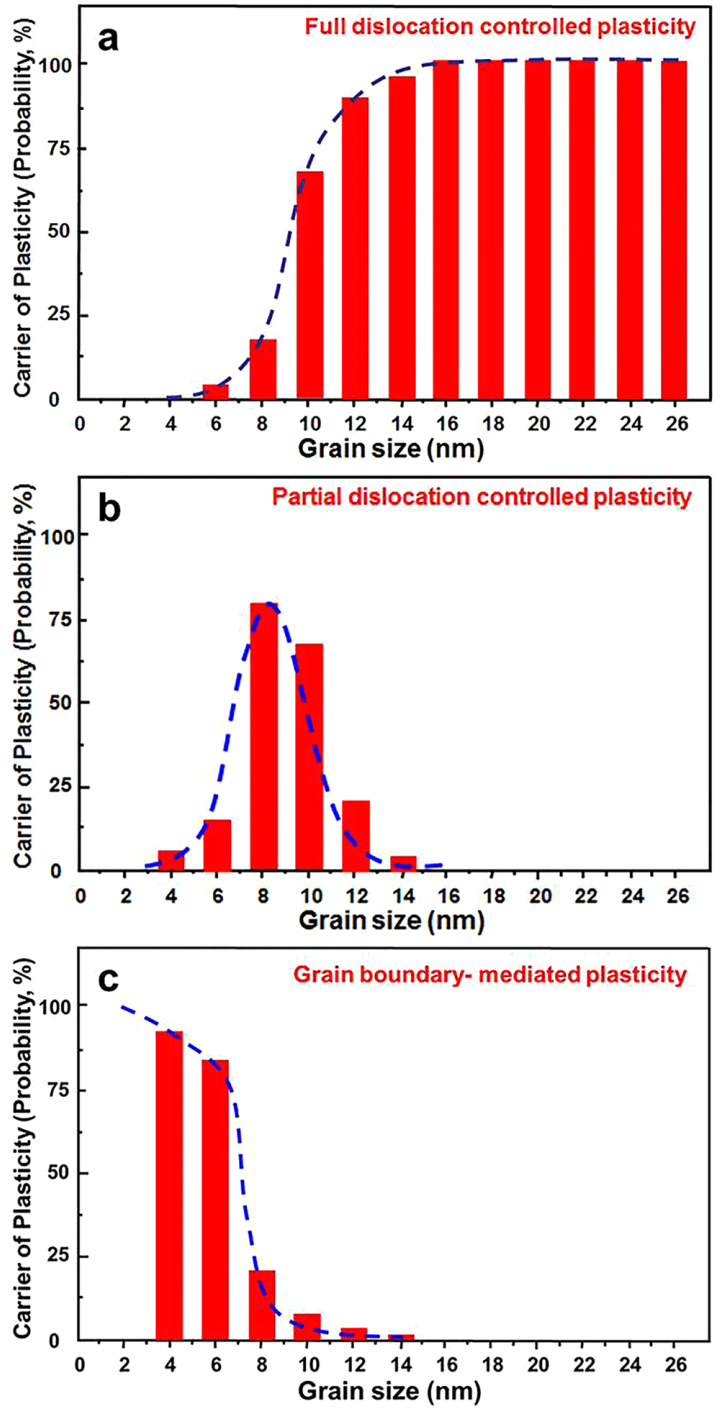
(a)全位错出现的频率,(b)部分位错出现的频率,(c)晶界介导塑性出现的频率。结果显示:d > 10 nm时全位错主导,6 nm
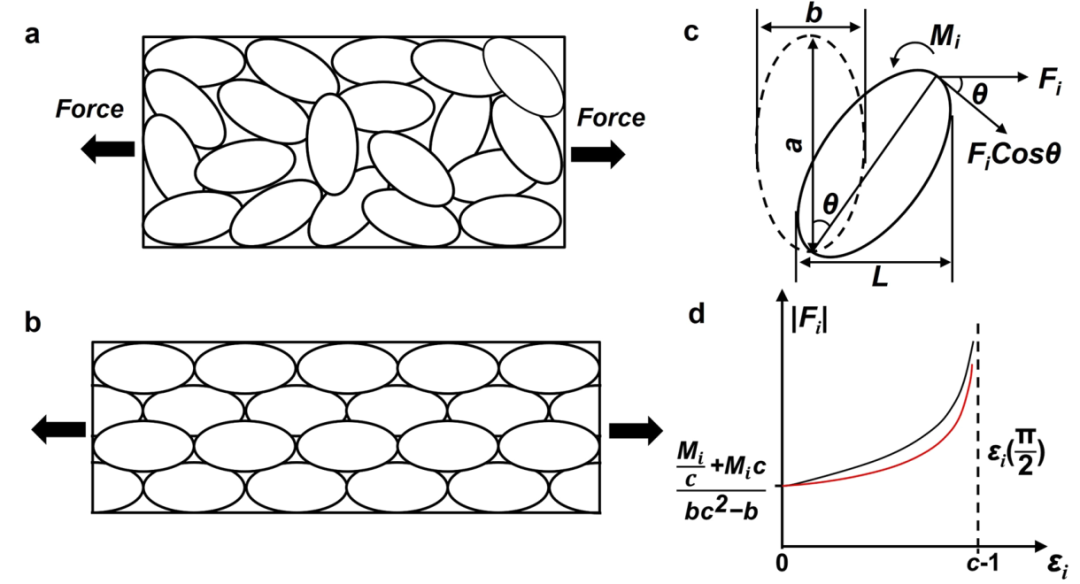
(a)原始纳米晶分布,(b)受力F作用后塑性变形导致的晶粒重新排列,(c)椭圆晶粒(a/b轴)在力Fi作用下的旋转模型,(d)恒定临界力矩阻力Mi下的|Fi|-εi曲线,显示旋转应变存在几何极限(c-1)。
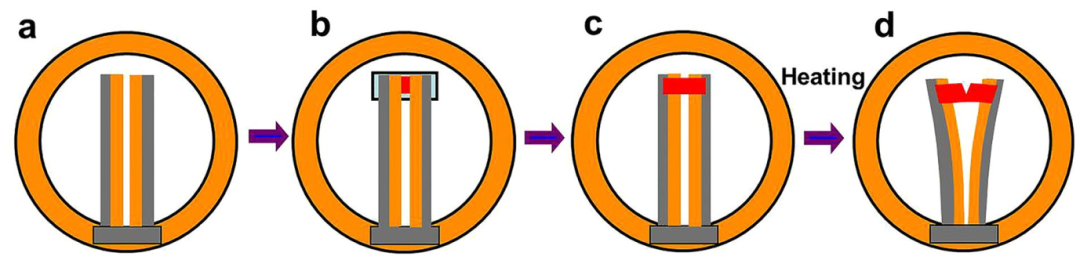
(a)自制双金属拉伸仪安装在3 mm TEM铜环上,(b)薄膜-基板样品用环氧树脂固定在拉伸臂末端(底面朝下),(c)溶解NaCl基板后游离的薄膜附着于拉伸臂,(d)通过加热双金属臂在TEM热台中对薄膜施加拉伸应变。图中尺寸未按比例绘制。
5. 文章结论
本研究通过实验证据与分析得出以下结论:
-
研究揭示了纳米晶铂薄膜塑性机制的晶粒尺寸依赖性。当晶粒尺寸d > 10 nm时,塑性变形以全位错活动为主;当10 nm > d > 6 nm时,转变为部分位错活动主导;当d
-
在缺乏位错活动的情况下,分析了扩散主导的其他变形机制。基于应变速率模型的分析表明,原子表面扩散可通过晶粒蠕变提供显著的应变速率贡献。
-
对晶粒旋转作为塑性机制的可行性进行了分析。结果表明,晶粒旋转的贡献取决于多个因素,包括平均晶粒纵横比、初始角位置、外加载荷及扩散系数(与温度相关)。晶粒旋转的应变贡献仅存在于非等轴晶(纵横比c ≠ 1)中,且存在最大应变极限(c – 1),恒定载荷下的旋转应变速率会随过程快速降低。
-
在本研究的等轴纳米晶铂薄膜中,原位观察到拉伸变形过程中的晶粒旋转现象。这归因于需要通过晶界滑动来协调塑性变形。
-
晶界滑动提供的应变速率与晶粒蠕变相当。两者均被认为是纳米晶铂薄膜塑性变形的主导机制。晶界滑动可能伴随晶粒旋转,这是由晶界间的摩擦滑动所致。
全文链接
https://doi.org/10.1038/s41598-017-13615-6
本文源自微信公众号:科学拾光
原文标题:《北工大团队《Sci. Rep》:原位电镜捕捉纳米铂全/半位错转变临界点》
原文链接:https://mp.weixin.qq.com/s/x_IWmrLwRPWjsGsfAJcrfw